The configuration of a planar four bar mechanism with frictionless joints is shown in the figure below. The length of the links are L₁
Question
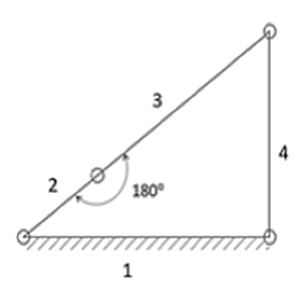
The configuration of a planar four bar mechanism with frictionless joints is shown in the figure below. The length of the links are L₁ = 40 mm, L₂ = 15 mm, L₃ = 35 mm, and L₄ = 30 mm. The suffixes 1, 2, 3 and 4 represents the fixed, input, coupler and output link respectively. If Ti and T₀ are the torque to the input and output link, what is the mechanical advantage (TiT0) of the mechanism?
A.
2
B.
0.5
C.
∞
D.
0
Correct option is A
Using the Freudenstein equation for four-bar mechanisms, the angular velocity ratio is derived from theinstantaneous centers of rotation. For the given configuration:1. Locate instant centers:∘I12: Joint between fixed link (1) and input link (2).∘I14: Joint between fixed link (1) and output link (4).∘I24: Intersection point of links 2 and 4 (found graphically or analytically).2. Velocity relationship:The linear velocity at I24 is the same for both links 2 and 4:ωi⋅L2⋅sin(θ2)=ωo⋅L4⋅sin(θ4)Thus:ωiωo=L4⋅sin(θ4)L2⋅sin(θ2)However, without the current angles (θ2 and θ4), we use the Grashof condition to infer motion.
For a Grashof crank-rocker mechanism (input link is crank, output link rocks), the MA varies with position.The maximum MA occurs when the input and output links are perpendicular to the coupler:MAmax=L2L4⋅sin(θ2)sin(θ4)At the toggle positions (when links 2 and 3 are aligned), MA approaches infinity (theoretical),but practically, it’s limited by friction and inertia.For general analysis, we use the torque ratio directly:MA=TiTo=ωoωi=L2⋅sin(θ2)L4⋅sin(θ4)Without specific angles, we assume an average configuration where sin(θ2)≈sin(θ4):MA≈L2L4=1530=2
Access ‘ISRO Mechanical Engineering’ Mock Tests with