Correct option is C
Gruebler’s Equation (Planar):M=3(n−1)−2j1−j2Where:M=mobility (degree of freedom)n=number of links (including the frame)j1=number of lower pairs (1 DOF joints like revolute or prismatic)j2=number of higher pairs (like cam-follower contact – 1 DOF but special case)
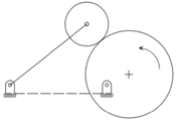
n=3(Cam, follower, frame)j1=2(2 revolute joints)j2=1(cam-follower contact)M=3(3−1)−2(2)−1=6−4−1=1